2017 年 7 月的 Science Robotics 封面图上,有那样一款机器人,其外观设计好像长条形包装袋前面部位配了一颗小小监控摄像头,总体好像给人一种便宜不光滑感。

但是,即然能走上机器人顶刊封面图,这一条由美国斯坦福大学机械设备工程学院协同美国加州大学圣巴巴拉校区机械设备工程学院打造出的机器人当然有两把刷子。
这款机器人就好像一根藤蔓,持续往前拓宽较长的间距。

自然,除开往前拓宽,它还会继续拐弯。
可以扛起一个净重 100 KG的木箱子,将来能够在检索援救、诊疗抢救等情景大展身手。
以往 4 年,研究团队在这里款机器人的导航栏难题上经常狠下功夫,现如今这条「设备藤蔓」乃至能够运用阻碍物开展最短路径算法了。
不久前,相关这款机器人的全新研究成效发布,名为 Robust Navigation of a Soft Growing Robot by Exploiting Contact with the Environment(运用与自然环境触碰的柔性生长发育机器人的鲁棒性导航栏)。

「设备藤蔓」怎样随意生长发育?
先来了解一下这款机器人是怎样“随意生长发育”的。
2017 年 7 月发布的毕业论文表明,这款机器人的设计方案遭受了藤蔓、细菌和神经元细胞等微生物的启迪:
这种植物体是根据生长发育并非健身运动来掌控其所处的自然环境。他们的特点取决于,身体从一端向外拓宽,长短成倍增加,而且还能积极操纵生长发育方位,因而产生了一种有效的三维构造,拥有一种在严苛受到限制的自然环境移动的工作能力。
研究团队设计方案出的软体气动式机器人外界是一根由柔性原材料做成的全透明管,內部原材料在未拓宽时呈伸缩情况。
其外观设计禁不住让本网编写想起美国通用电气公司受泥鳅和树杆的启迪,为美国防部高級研究计划局(DARPA)产品研发的一款用以军事演习的迅速隧道施工发掘机器人。

但不会太难发觉,斯坦福大学团队的机器人更具有协调能力。
有关机器人的內部原材料,斯坦福学校官方网详细介绍:
在原形中,大家采用的是一种又薄又划算的塑胶,向其引入充压气体时,塑胶便会进行;但是在别的版本号中,大家会用液体替代气体。
事实上,作出这款机器人关键根据两层面基本原理。
其一,根据用耐压液体驱动器原材料的基本原理,研究团队给机器人设计方案了一个颠倒的厚壁“外套”,根据內部施加压力,机器人可以由顶部拓宽出来。
其二,根据增加时的不可逆性,研究团队设计方案了一种自然环境刺激性认知系统软件,能够积极操纵方位(简易而言便是,机器人的驱动器根据减少身体的一侧来完成,仅有那样机器人才拥有拐弯的工作能力)。
「设备藤蔓」怎样整体规划途径?
那麼在具体运用中,这款机器人怎样导航栏呢?
毫无疑问,针对刚度机器人来讲,与阻碍物造成撞击是比较风险的 —— 相相对而言,因为软体机器人具备低惯性力,身体也更加绵软,因而研究团队觉得,专家专业去管束机器人、防止其造成撞击的作法实际上是多余的,有时候反倒会对机器人的健身运动有一定的限定。特别是在检索援救等状况下,机器人一般要在错乱或受到限制的自然环境中导航栏,遇到阻碍物是难以避免的。
因而研究团队的作法是,用一个工作经验动力学实体模型(empirical kinematic model)对「设备藤蔓」与其说所处自然环境的相互影响开展了数学课化的叙述。根据该实体模型,研究团队开发设计了一种整体规划机器人途径的方式。
研究团队将这一实体模型称之为是「研讨式实体模型」(heuristic model),这是由于阻碍物能够处于被动地正确引导机器人,降低其健身运动全过程中的可变性。如下图所显示,鲜红色线框相匹配的是未历经提升的机器人健身运动途径,深蓝色则意味着提升后的結果。
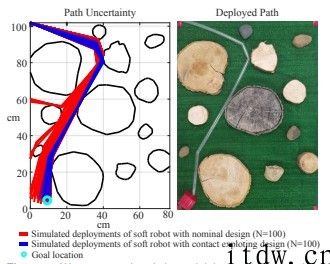
这张动态图能够更为清楚地见到线路的调节。
我们可以那样了解,这一方式并并不是要防止机器人与自然环境触碰,只是在碰到阻碍物时,擅于运用阻碍触碰,使其对导航栏造成积极主动功效。
试验说明:
与防止全部阻碍触碰的整体规划方法对比,考虑到并灵活运用阻碍触碰的整体规划方法所造成的途径应对可变性主要表现更好。
值得一提的是,这一最短路径算法方式把对机器人身体的操纵迁移到自然环境中,机器人需要的驱动器从而降低。
由此可见,斯坦福学校的全新研究促使软体机器人导航栏难题拥有进一步提升。
有关创作者
毕业论文创作者包含 IEEE Fellow、斯坦福学校机械设备工程学院电子信息科学技术专业专家教授 Allison M. Okamura,即 IEEE Robotics and Automation Letters 杂志期刊小编,曾是约翰霍普金斯高校机械设备工程学院专家教授、副书记。
1994 年,Allison M. Okamura 获美国加州大学伯克利大学理学学士学士学位,在 1996 年、2000 年各自得到斯坦福学校机械自动化硕士和博士学士学位。
其关键研究行业包含触感学、远程控制、虚拟器和手机模拟器、诊疗机器人、软体机器人、神经系统结构力学和恢复、修补术与文化教育这些。曾获 2020 年 IEEE 医药学与生物技术学好技术性荣誉奖、2019 年 IEEE 机器人与自动化技术学好优秀服务奖、2005 年 IEEE 机器人与自动化技术学好初期学术研究职业生涯奖等奖项。
© 版权声明
文章版权归作者所有,未经允许请勿转载。

版权声明:
1、IT大王遵守相关法律法规,由于本站资源全部来源于网络程序/投稿,故资源量太大无法一一准确核实资源侵权的真实性;
2、出于传递信息之目的,故IT大王可能会误刊发损害或影响您的合法权益,请您积极与我们联系处理(所有内容不代表本站观点与立场);
3、因时间、精力有限,我们无法一一核实每一条消息的真实性,但我们会在发布之前尽最大努力来核实这些信息;
4、无论出于何种目的要求本站删除内容,您均需要提供根据国家版权局发布的示范格式
《要求删除或断开链接侵权网络内容的通知》:https://itdw.cn/ziliao/sfgs.pdf,
国家知识产权局《要求删除或断开链接侵权网络内容的通知》填写说明: http://www.ncac.gov.cn/chinacopyright/contents/12227/342400.shtml
未按照国家知识产权局格式通知一律不予处理;请按照此通知格式填写发至本站的邮箱 wl6@163.com
1、IT大王遵守相关法律法规,由于本站资源全部来源于网络程序/投稿,故资源量太大无法一一准确核实资源侵权的真实性;
2、出于传递信息之目的,故IT大王可能会误刊发损害或影响您的合法权益,请您积极与我们联系处理(所有内容不代表本站观点与立场);
3、因时间、精力有限,我们无法一一核实每一条消息的真实性,但我们会在发布之前尽最大努力来核实这些信息;
4、无论出于何种目的要求本站删除内容,您均需要提供根据国家版权局发布的示范格式
《要求删除或断开链接侵权网络内容的通知》:https://itdw.cn/ziliao/sfgs.pdf,
国家知识产权局《要求删除或断开链接侵权网络内容的通知》填写说明: http://www.ncac.gov.cn/chinacopyright/contents/12227/342400.shtml
未按照国家知识产权局格式通知一律不予处理;请按照此通知格式填写发至本站的邮箱 wl6@163.com