太阳能热水工程设计制造商
太阳能热水工程加空气能热泵,很好的节能配套设备
平板太阳能集热器的组成
平板太阳能热水器
光伏发电系统
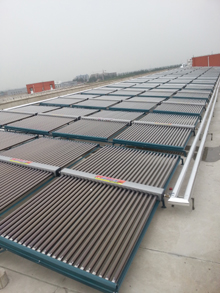
太阳能热水工程真空管集热系统问题应急处理方案
合同能源管理
空气能热泵系列
太阳能发电系列
维也纳精品酒店21吨太阳能热水工程
浦东小区配套太阳能热水器工程案例
太阳能热水工程,员工洗浴热水工程-嘉定食品厂太阳能热水器工程
壁挂式平板分体太阳能工程集中供热系统
太阳能热水工程控制系统
平板集热器太阳能热水工程
不锈钢保温水箱
企业介绍
芜湖:街头公共设施“恋”上太阳能
政府成为太阳能事业发展的大推手
女子“抢”到太阳 所有人都得付费
破解太阳能建筑供暖制冷双重难题
太阳能的春天从年会开始
太阳能建筑成众企业“进城”捷径





















 工程方案
工程方案 工程价格
工程价格 售后维修
售后维修
 网站首页
网站首页 产品中心
产品中心 新闻资讯
新闻资讯 一键拨打
一键拨打